PROTOTYPE

コンベア型(掻きあげ型)食洗機と連動している食洗機ロボットです。
本来、コンベア型の食洗機を使うとなると、人の手で、皿をひっくり返す動作と、最後に上がってくる食器を種類で左右に仕分ける動作が必要になります。
それらをロボットと反転機が対応することで、無人で行うことが可能になります。

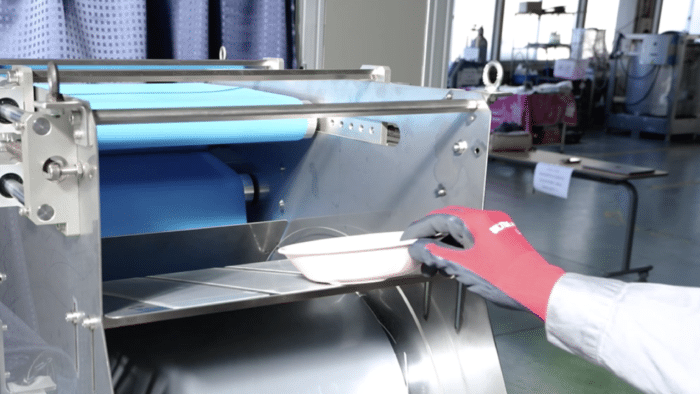
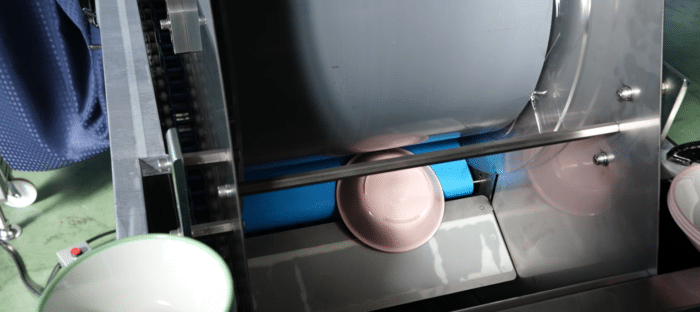
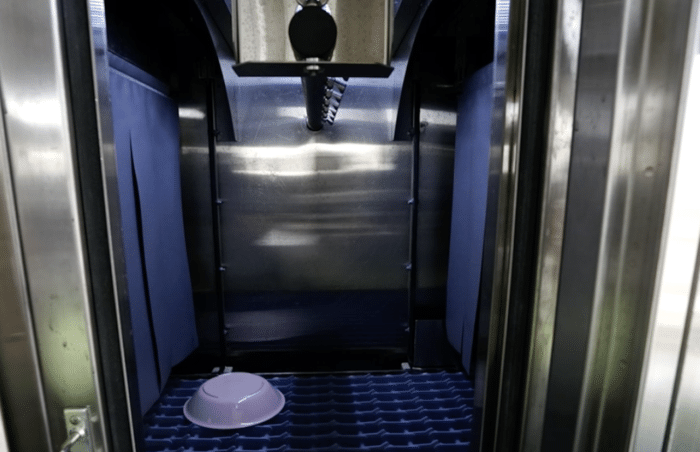
食器浸漬槽からかき上がった皿の殆どは上向きになるため、洗浄可能な伏せた状態になるよう、反転機でひっくり返します。
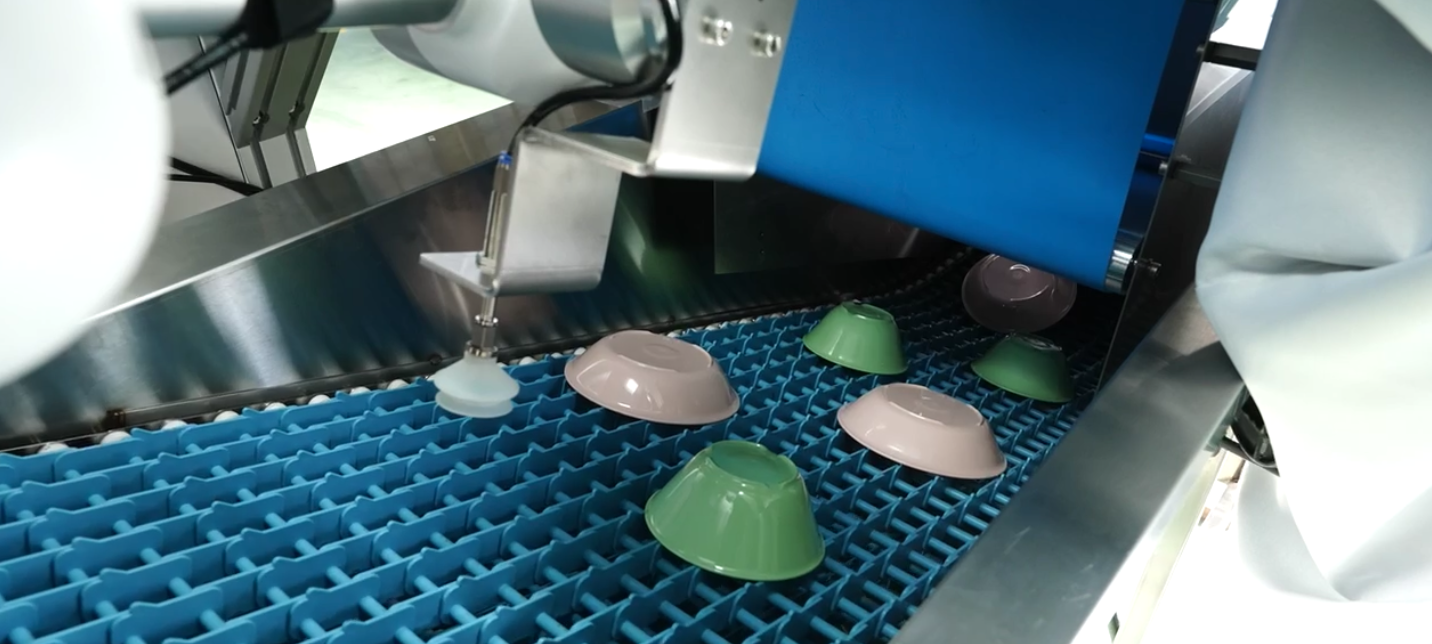
ひっくり返ってきた皿を、ロボットアームによって仕分けします。
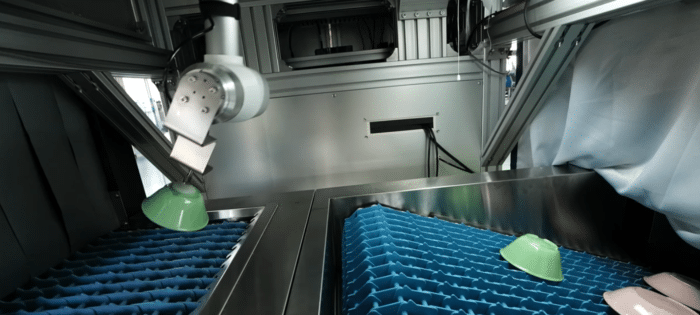
同じ食器を最後に重ねていくため、ロボットを使用して、同じ種類の食器別に、左右に仕分けします。
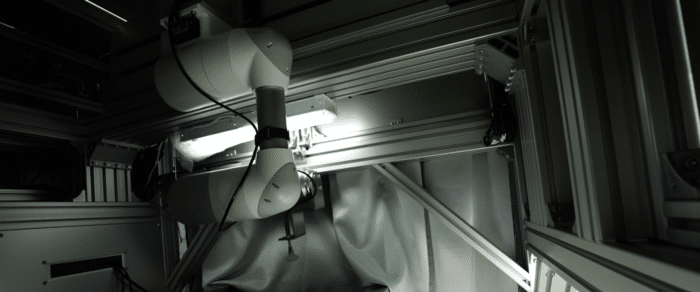
ロボットは左右に動くことができます。
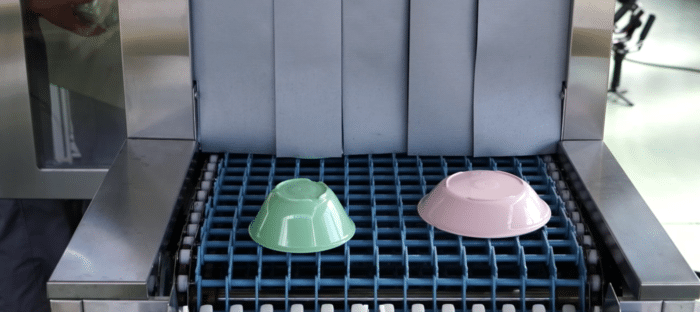
このPOCでは、1ラインで2種類の皿を仕分けていますが、ベルトコンベアの横幅を広げることで、最大6種類の食器を仕分け・整列させることができます。
種類別に整列されたお皿やお椀は、コンベア型洗浄機に入って洗浄されます。
洗浄された食器が、種類別にレーンに並びます。

そのまま、同じタイプの器ごと、自動で重ねられていきます。

これまで人の手による補助が必要だった食洗機が、自動化されました。
本製品はプロトタイプのため、
販売や資料請求のお問合せは
受け付けておりません。ご了承くださいませ。